AWS 클라우드 컴퓨터 내에서 ros2 로 Isaac Sim 내 로봇 조종하기 1
우선 내가 다운로드한 AWS Nvidia Omniverse AMI에는 ubuntu 20.04 가 깔려 있다.
여기에 ros2-humble-desktop 을 설치하려고 했으나 계속 ubable to download 가 뜬다.
그래서 docker 로 humble을 설치했는데, 알아보니 docker 가 여러 버전의 humble 을 하나의 os 위에 다운할 수 있다는 엄청난 장점이 있었다. 그러니까 하나의 컴퓨터 위에 어떤 독립된 또 하나의 컴퓨터가 돌아가고 있다고 생각하면 좋다.
다운로드 또한 쉽다.
내가 다운로드 한 humble 의 설치 명령어 이다.
docker pull ros:humble
이러면 ubuntu 22.04 버전 안에 있는 humble이 설치된 독립된 컨테이너가 생성된다.
참고로 이것을 하려면 먼저 docker 가 설치되어 있어야 한다.
docker 설치는 다른 블로그에서 찾아보자. 아래 그냥 내가 찾아본 블로그 링크를 걸어두겠다.
https://haengsin.tistory.com/128
Ubuntu 에 Docker 설치
실행환경 Ubuntu 22.04 Docker 설치방법 1. 우분투 시스템 패키지 업데이트 sudo apt-get update 2. 필요한 패키지 설치 sudo apt-get install apt-transport-https ca-certificates curl gnupg-agent software-properties-common 3. Docker의
haengsin.tistory.com
그리고 우분투 창에서 다음 명령어를 실행하면 docker 가 실행된다.
docker run -it ros:humble
그러면 아래 하면과 같이 cloud 컴퓨터 내에서 docker 로 ros2 humble 을 돌릴 수 있다.
이제 isaac sim 과 docker 내 ros2 humble 과 통신을 연결해 볼 차례이다.
먼저 아이작 심을 돌리는 원래 우분투에서의 네트워크와 docker 의 네트워크를 같게 해줘야 한다.
다음 명령어를 통해서 가능하다.
docker run -it --network host ros:humble
그런데 isaac sim 을 돌리는 호스트 컴퓨터에서도 ros2 가 있어야 한다.... 아니면 너무 복잡하다. 포트 포워딩을 통해야 된다고 한다..
https://docs.ros.org/en/humble/Installation/Alternatives/Ubuntu-Development-Setup.html
Ubuntu (source) — ROS 2 Documentation: Humble documentation
You're reading the documentation for an older, but still supported, version of ROS 2. For information on the latest version, please have a look at Jazzy. Ubuntu (source) Table of Contents The current Debian-based target platforms for Humble Hawksbill are:
docs.ros.org
위 링크를 통해서 우분투 20.04 에 맞춰 설치해주면 된다.
아래 화면은 그에 맞는 ros2 를 aws cloud 컴퓨터 내에서 깔고 있는 것이다.
근데 설치만 40분이 넘게 걸리고 있다..ㅠㅠ

끝마치는데까지 대략 52분이 걸렸다..
그러고 나서 talker 와 listener 를 돌려보았다.
잘 되는 걸 확인해보았다.
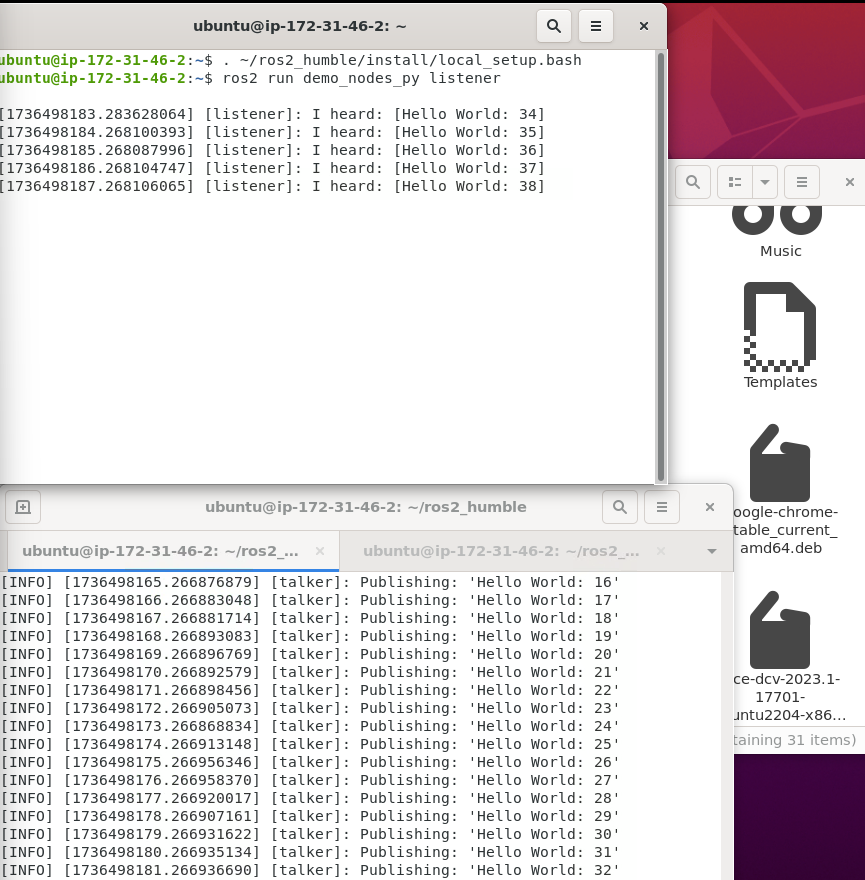
드디어 AWS cloud 컴퓨터 내에서도 20.04우분투 버전 ros2 humble 설치 완료!!
이제 Isaac Sim에서 ros2 로 로봇을 조종하는 것을 포스팅하겠다!!